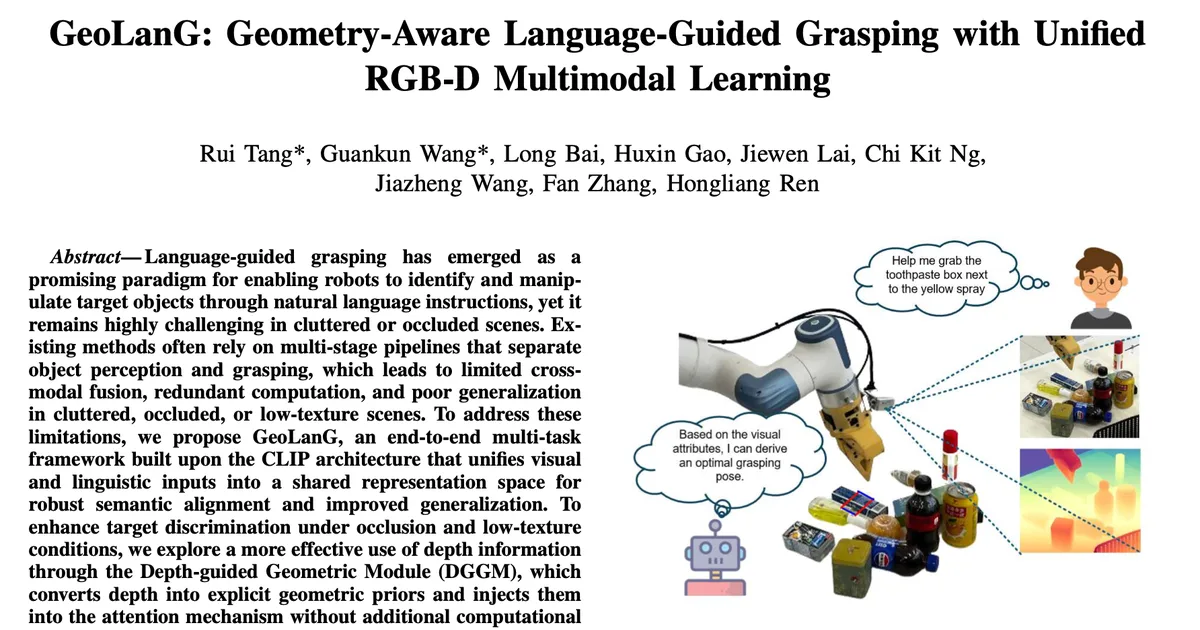
研究人员开发了GeoLanG,一个将几何推理与语言理解统一用于机器人抓取的创新框架。该方法将RGB-D数据和语言特征整合到共享表示中,并采用深度引导的几何模块,将几何先验直接纳入注意力机制。GeoLanG在基准测试中表现出卓越的性能,并在杂乱、遮挡的环境中表现出鲁棒性,并在真实机器人硬件上成功验证。 AI
影响 该框架有望显著提高机器人在复杂、真实世界场景中的操作能力。
排序理由 该集群描述了一个新的研究框架及其在基准测试上的性能,符合研究类别。[lever_c_demoted from research: ic=1 ai=1.0]
AI 生成摘要 · Google Gemini · 来自 1 个来源。 我们如何撰写摘要 →