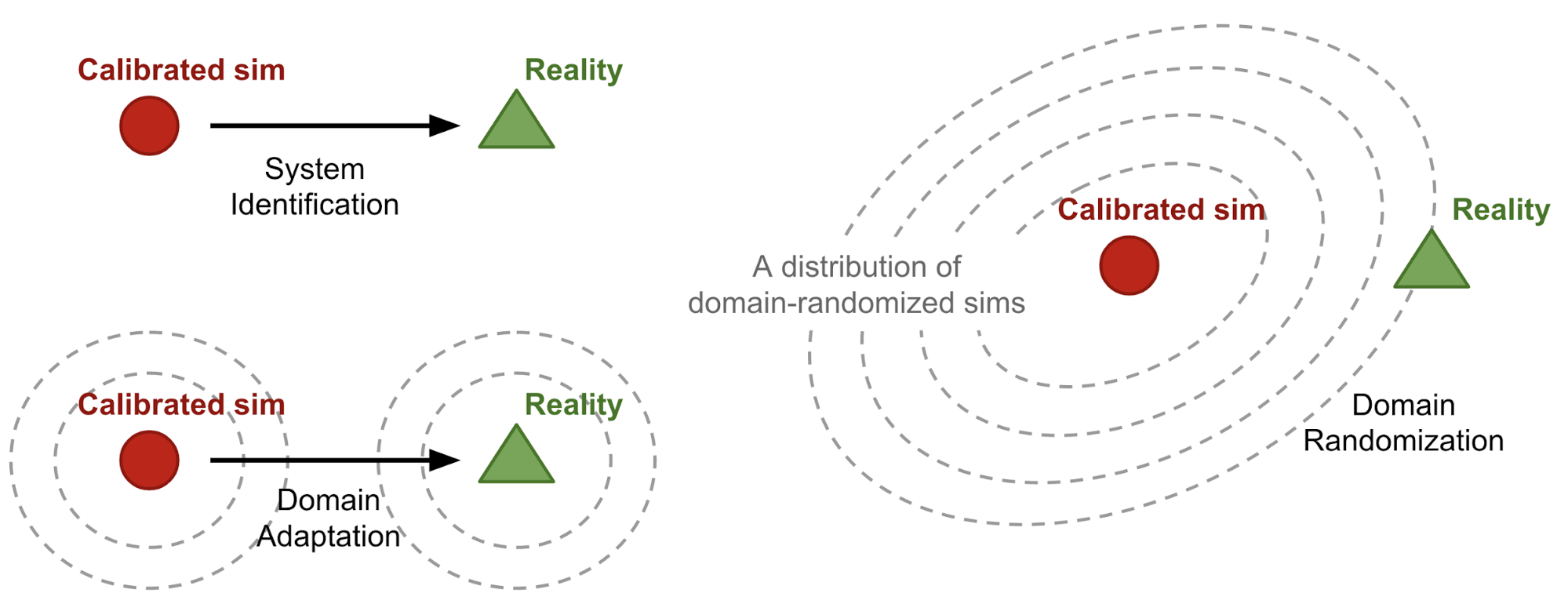
域随机化(DR)是一种在机器人领域用于弥合仿真训练环境与现实世界之间差距的技术。该方法涉及在具有随机物理参数和视觉外观的各种仿真场景中训练模型。目标是使训练好的模型能够有效地泛化到现实世界环境,而现实世界环境被假定为训练期间遇到的众多变化之一。DR 特别有用,因为与域适应方法不同,它可能需要很少或无需真实世界数据。 AI
排序理由 该条目是一篇博客文章,讨论了机器人领域用于 sim2real 迁移的研究技术(域随机化)。
AI 生成摘要 · Google Gemini · 来自 1 个来源。 我们如何撰写摘要 →