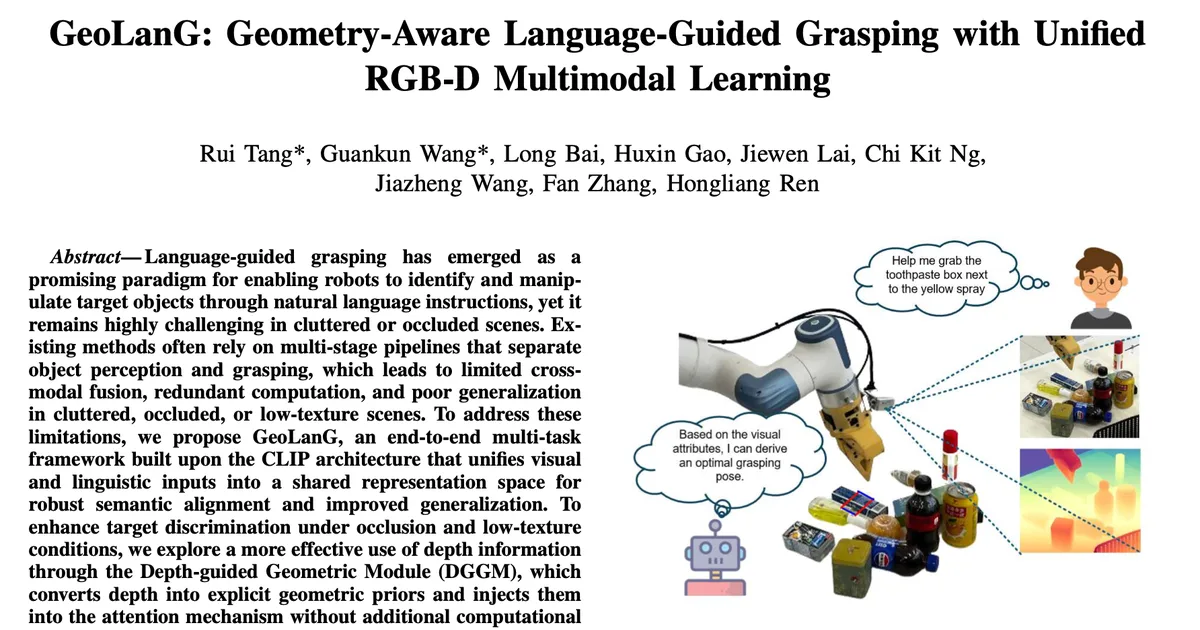
Researchers have developed GeoLanG, a novel framework that unifies geometric reasoning with language understanding for robot grasping. This approach integrates RGB-D data and language features into a shared representation, with a depth-guided geometric module that incorporates geometric priors directly into the attention mechanism. GeoLanG has demonstrated superior performance on benchmarks and robustness in cluttered, occluded environments, with successful validation on real robot hardware. AI
IMPACT This framework could significantly improve robot manipulation capabilities in complex, real-world scenarios.
RANK_REASON The cluster describes a new research framework and its performance on benchmarks, fitting the research bucket. [lever_c_demoted from research: ic=1 ai=1.0]
AI-generated summary · Google Gemini · from 1 sources. How we write summaries →